書籍サポート
Unity シミュレーションで学ぶ人工知能と人工生命-- 創って理解するAI--
「Unity シミュレーションで学ぶ人工知能と人工生命-- 創って理解するAI--」, 伊庭斉志 + MIT/MindRender
開発グループ, (オーム社)
で解説されているソフトウェアのページです。
ソフトウェア等のご利用にあたって
- このソフトウェア等は伊庭研究室が作成し、無償で配布しているものです。出版社が提供するサービスではありません。
- このソフトウェア等の著作権は、伊庭研究室が保持しています。ダウンロードしたソフトウェア等を再配布することはできません。
- このソフトウェア等に起因するいかなる損害に対しても、伊庭研究室は何ら責任を負いません。
- 伊庭研究室は予告なくソフトウェア等の内容を更新したり、提供を中止することがあります。
- Mind Renderに関しては以上の注意書きは該当しません。 Mind Renderの利用規約を参照してください。
配布ソフトウェア
UniyによるAI/ALシミュレータ
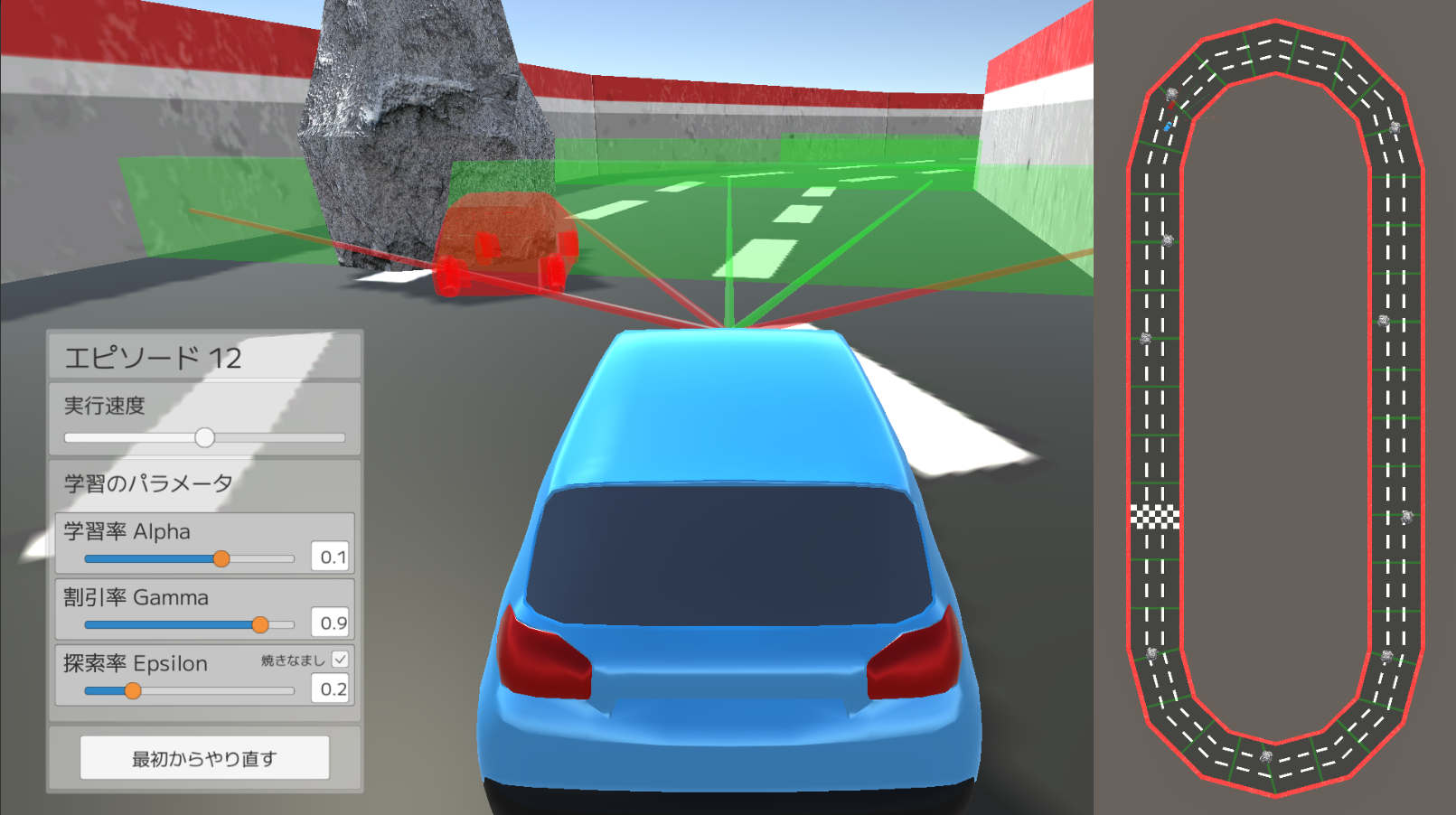 |
AIによる自動運転学習 とりあえず動かしてみる (2.1節) |
強化学習とニューロ進化による学習シミュレーション [Webブラウザ上で実行可能版(Chrome推奨)] [実行ファイル, Windows,64bit用(22.2MB)] |
 |
AIによる自動運転学習のプロジェクト (3.4節) |
強化学習とニューロ進化による学習シミュレーション [プログラム(6.9MB)] |
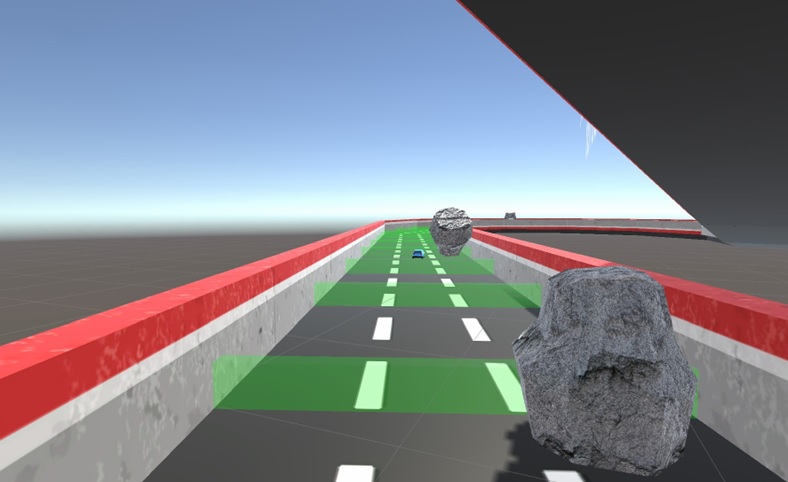 |
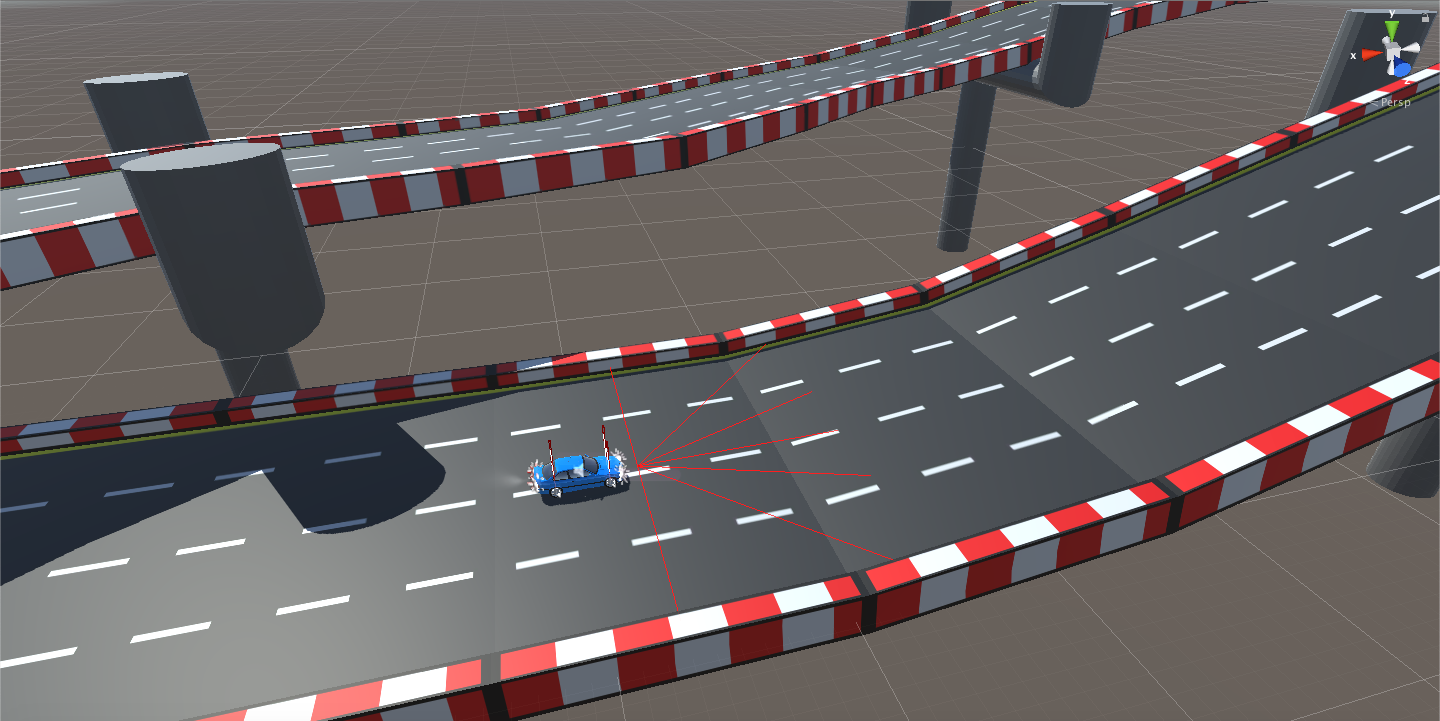
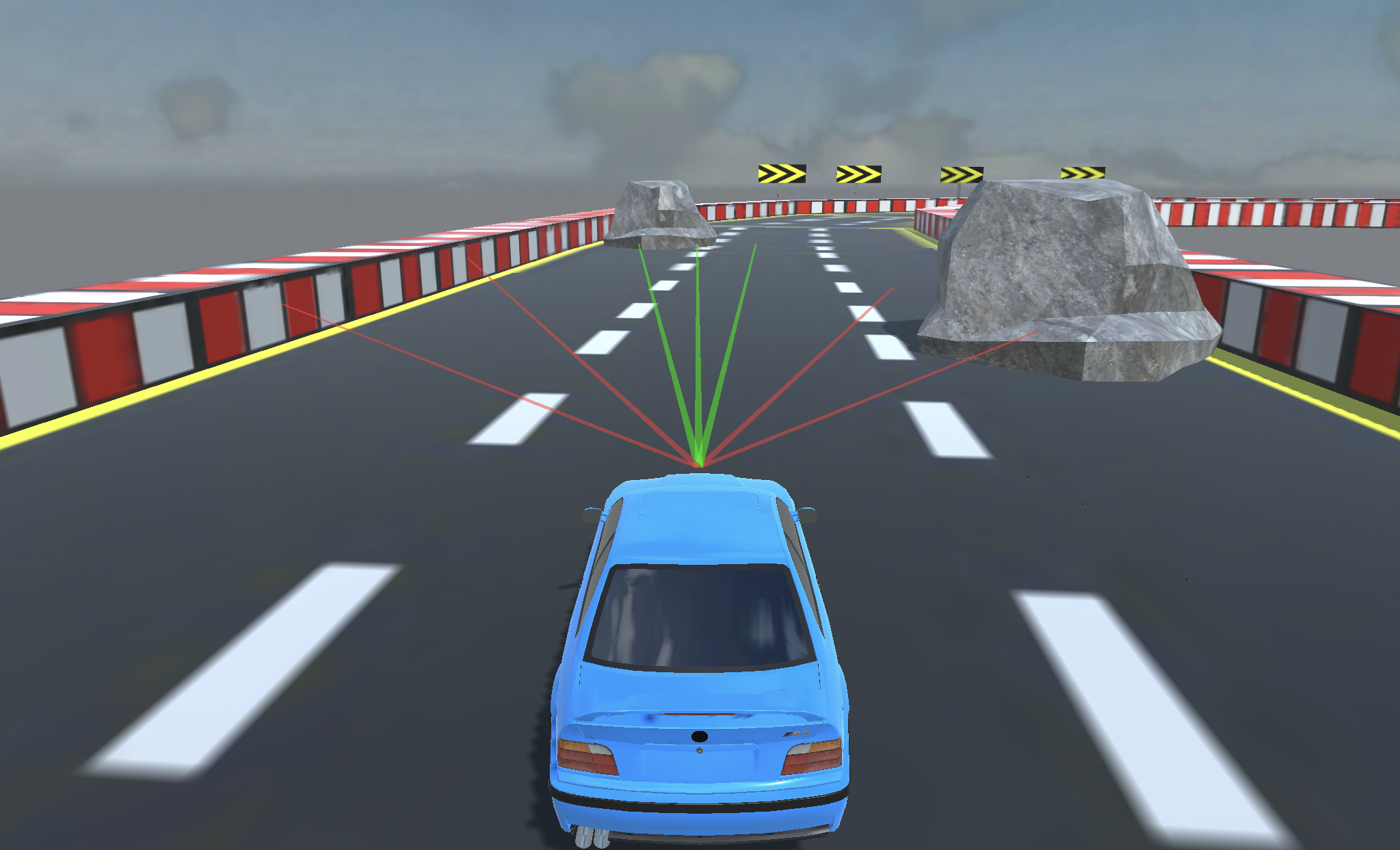
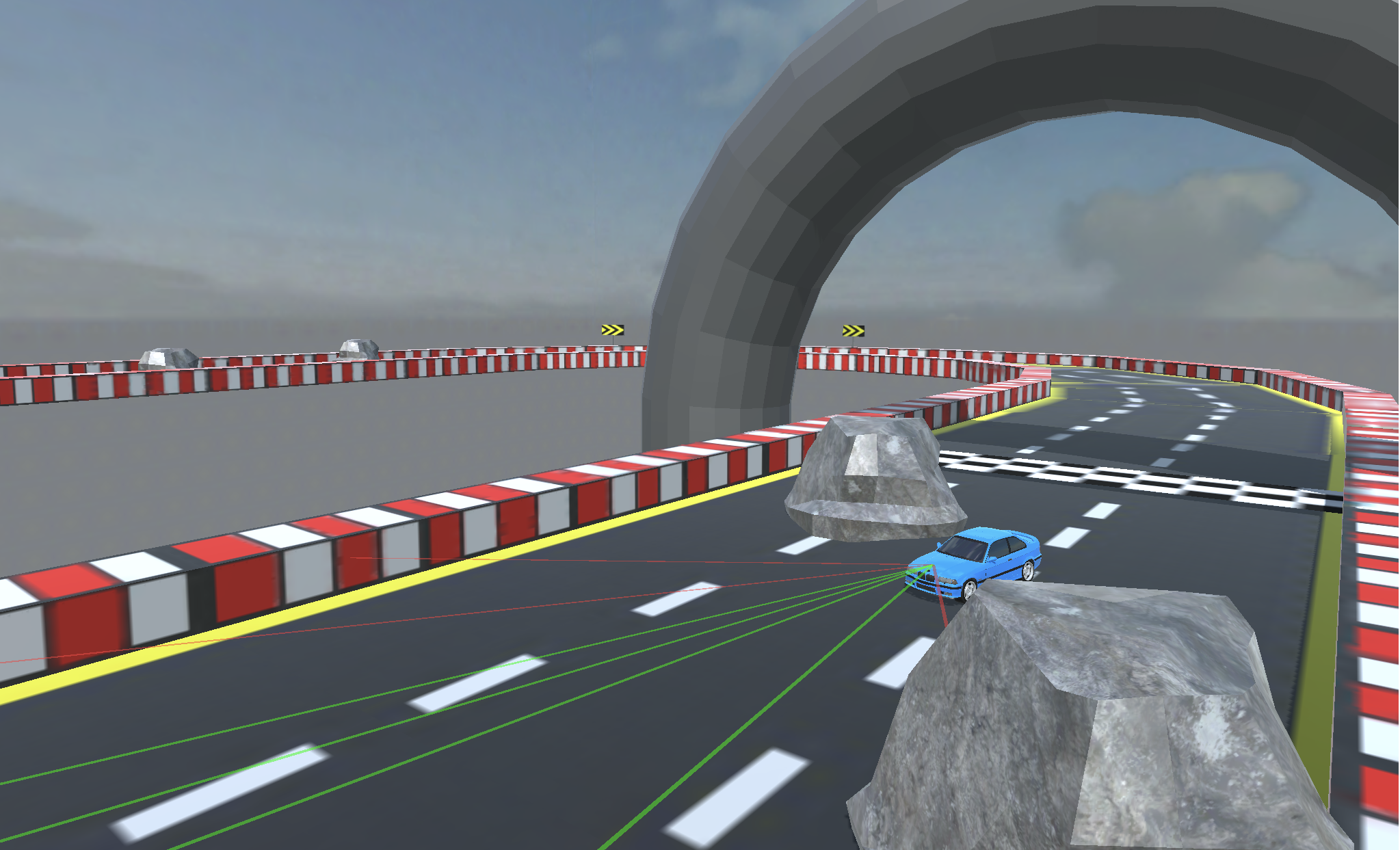
自動運転学習のチャレンジ版 (3.7節) |
障害物や落石を避ける学習シミュレーション [プログラム(4.8MB)] |
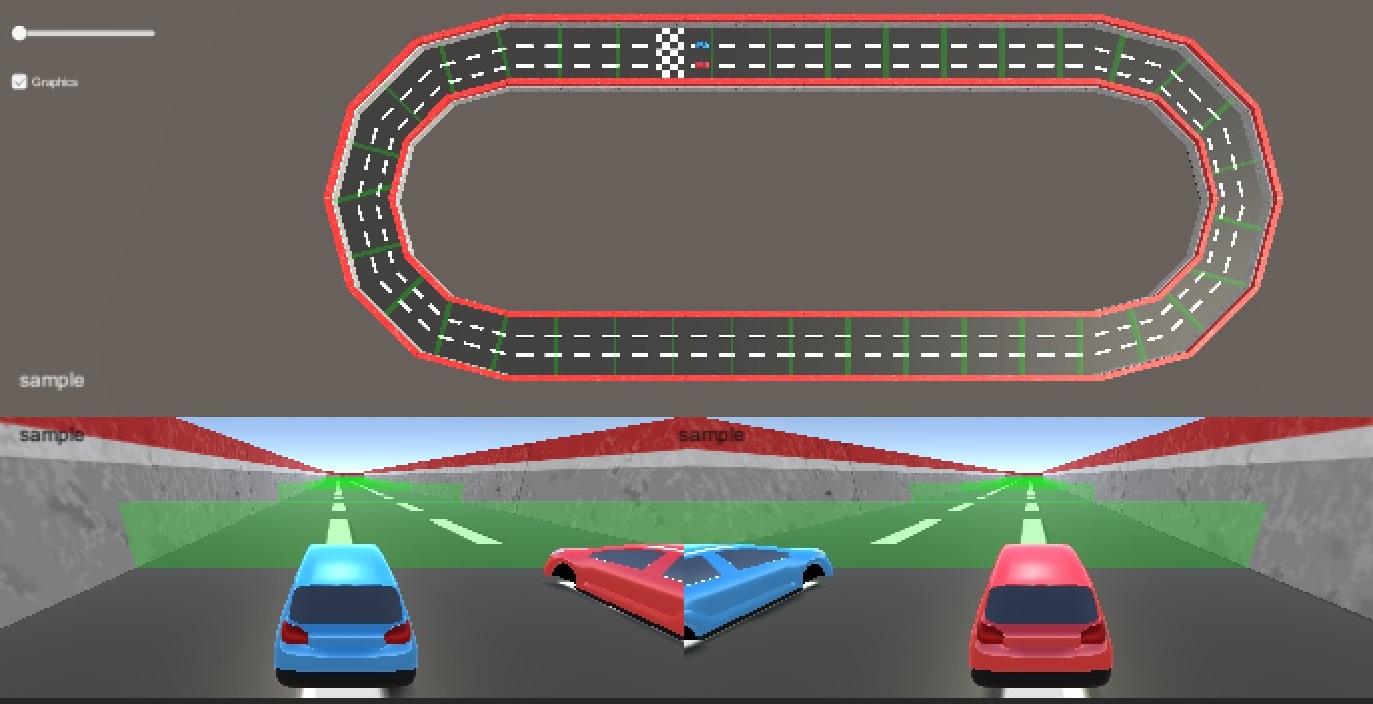 |
自動運転学習で競走しよう (3.8節) |
自動運転での対戦型レーシング・シミュレーション [プログラム(11.2MB)] |
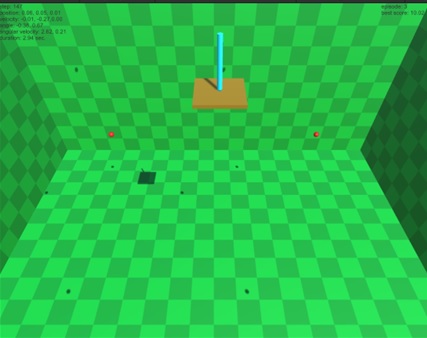 |
ニューラルネットワークの学習 (4.4節) |
バックプロパゲーションによる3次元倒立振子 [プログラム(504kB)] |
 |
エアーホッケーでAIと対戦してみよう (4.7節) |
ニューロ進化によるエアーホッケーのゲームAI [プログラム(3.1MB)] |
 |
車の形状の進化 (5.4節) |
進化計算による形状学習 [プログラム(132kB)] |
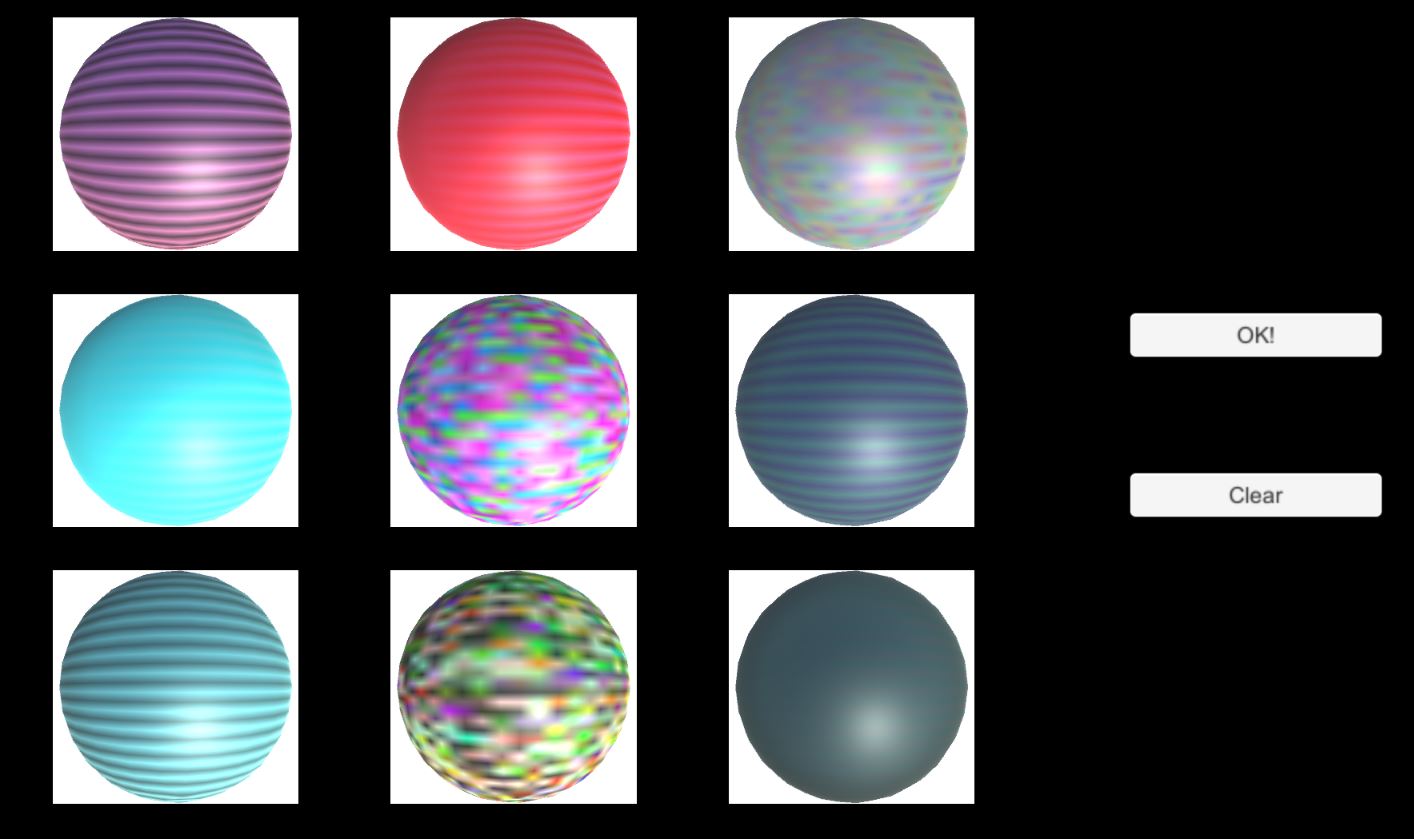 |
球体に色付けしよう (5.6節) |
対話型進化計算によるデザイン Unityのversionにより以下の変更が必要になります。 Game画面において、Free AspectではなくFull HD(1920*1080)を選択してください。 [プログラム(4MB)] |
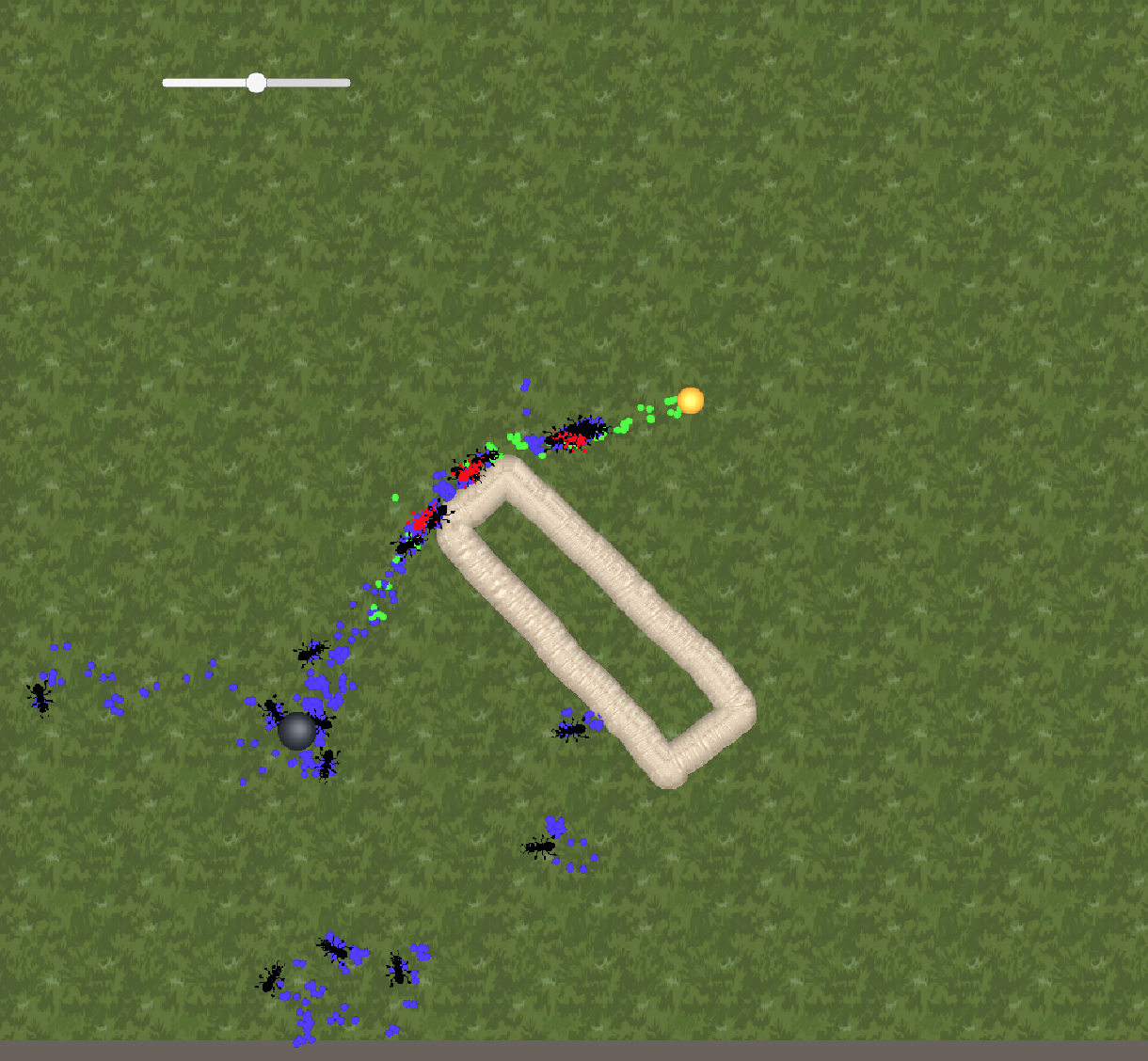 |
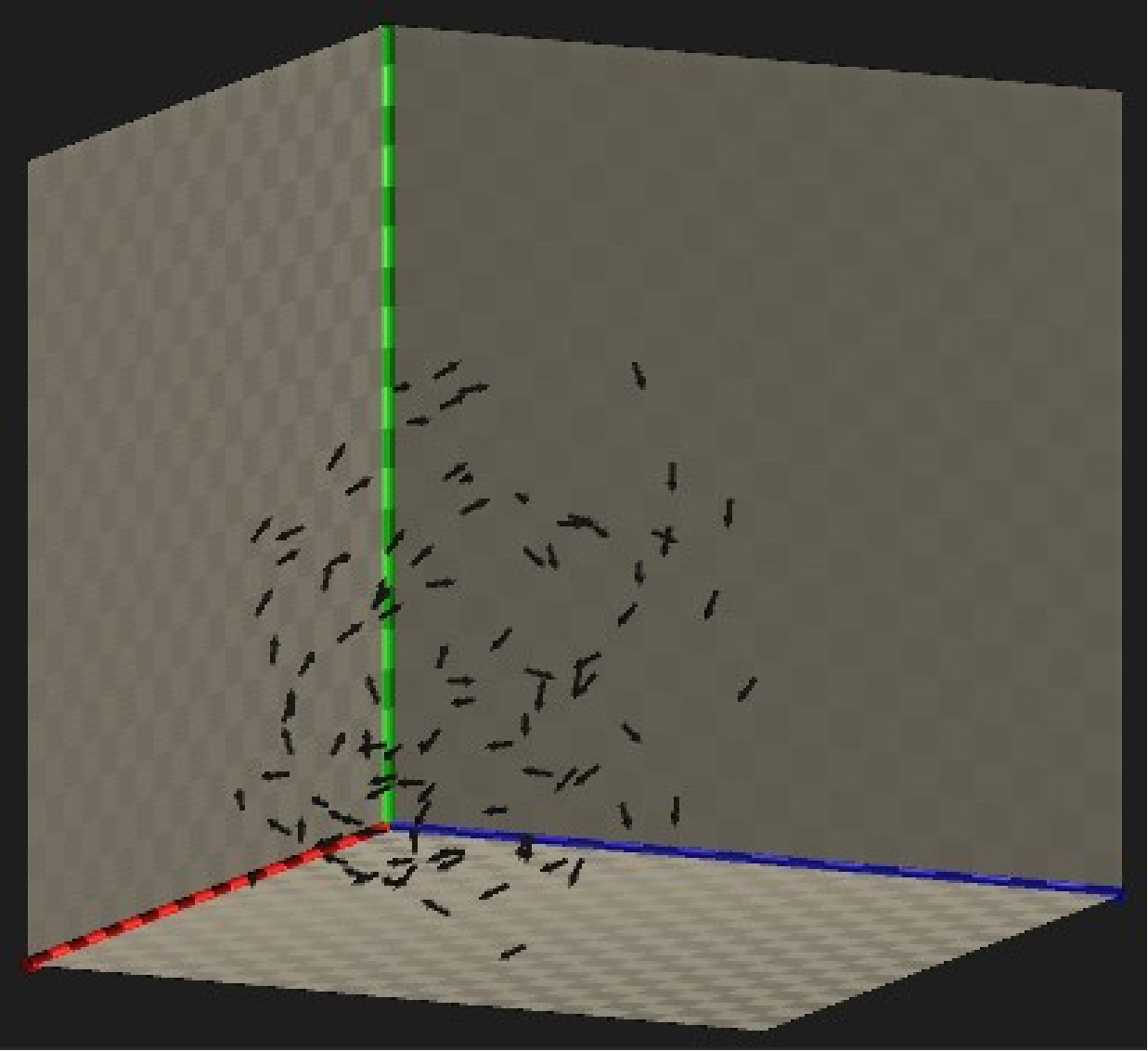
アリの知恵 (6.1節) |
アリによるフェロモントレイルのシミュレーション.障害物を賢くよけられるか? [プログラム(715kB)] |
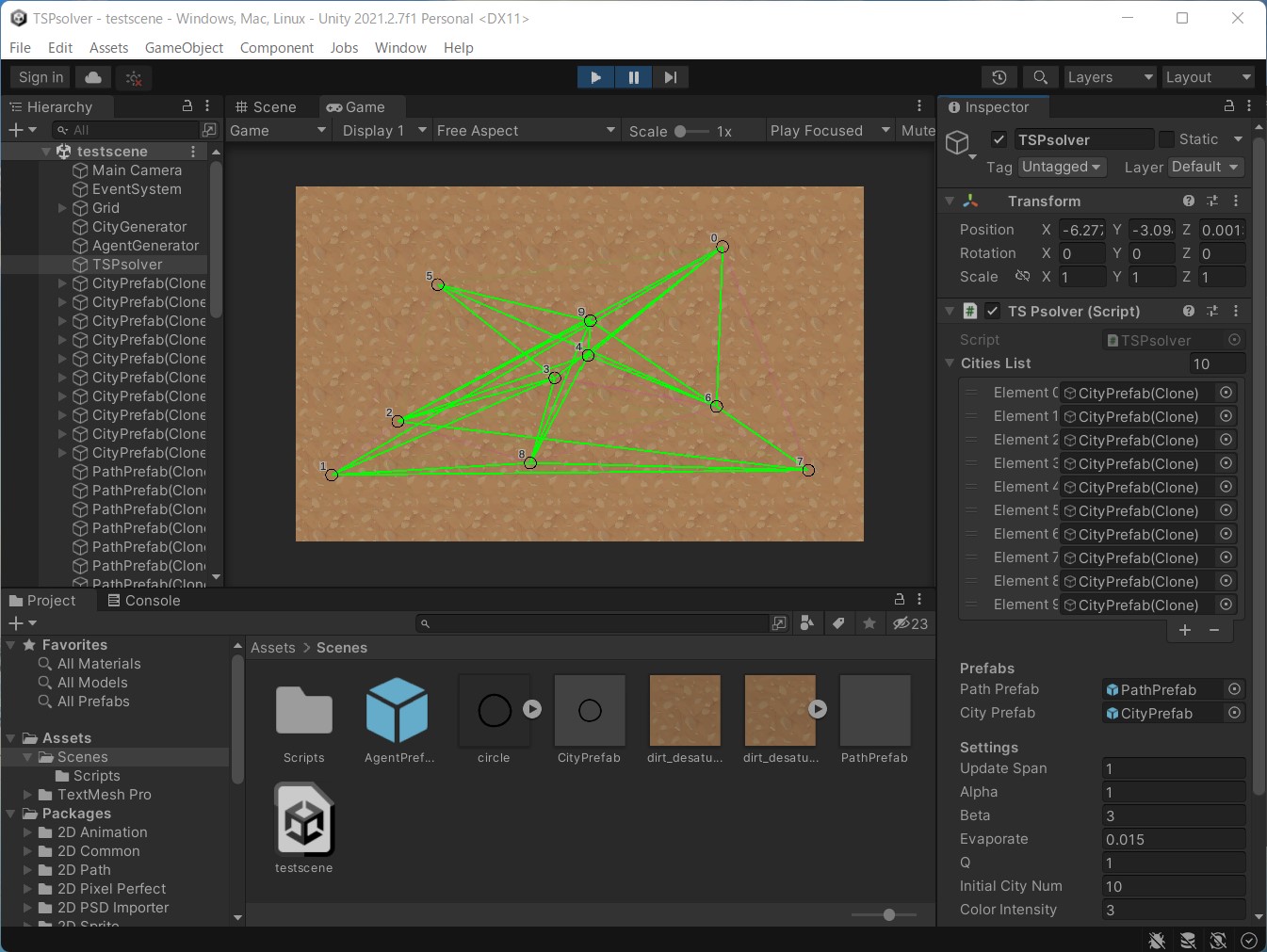 |
アリのメタヒューリスティックス (6.3節) |
ACOを用いたTSP(Traveling Salesman Problem, 巡回セールスマン問題) [プログラム(2MB)] |
 |
Boidのシミュレーション (7.1節) |
鳥と魚の群行動のシミュレータ [プログラム(85MB)] |
 |
鳥と魚の群れを制御しよう (7.2節) |
Couzinアルゴリズム のシミュレーション 小魚の群れを襲う捕食魚の振る舞いも実現しています(7.3節) [プログラム(24MB)] |
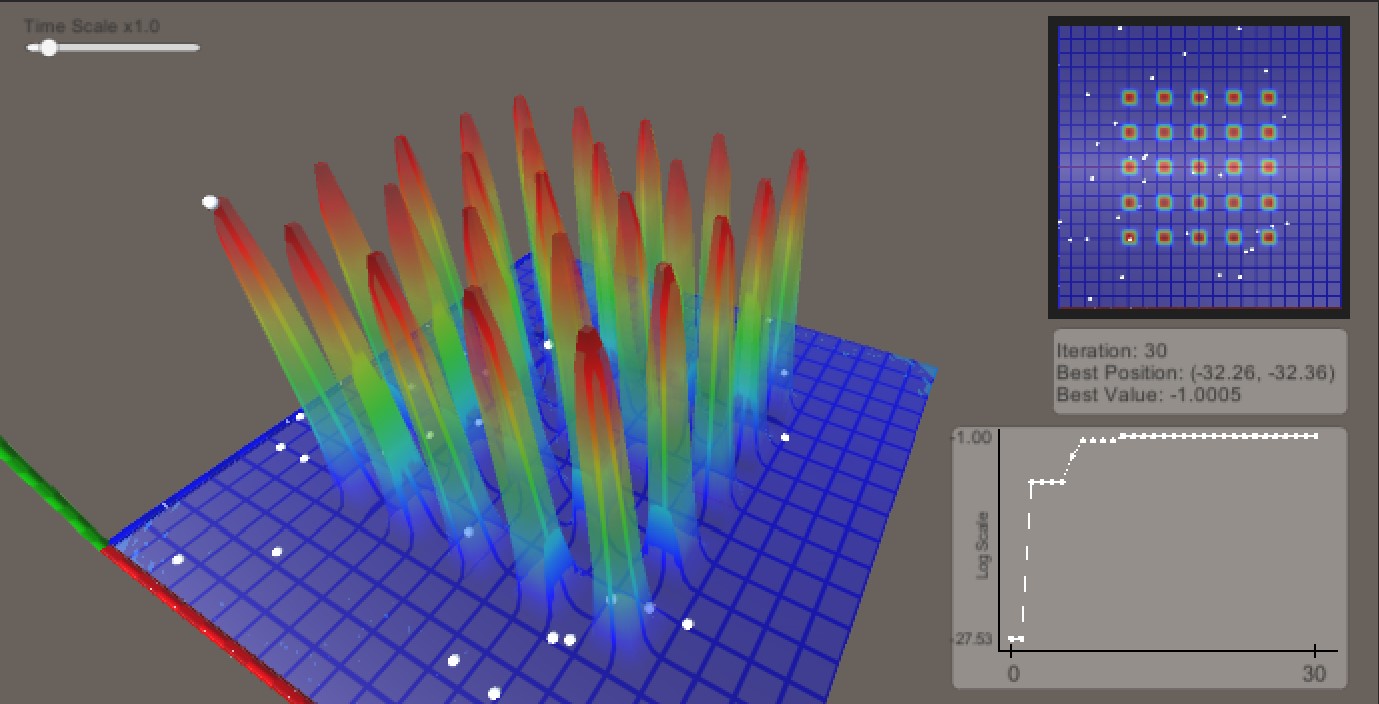 |
鳥や魚のメタヒューリスティックス (7.5節) |
PSO(Particle Swarm Optimization)の最適化シミュレータ(暫定版) [プログラム(1MB)] |
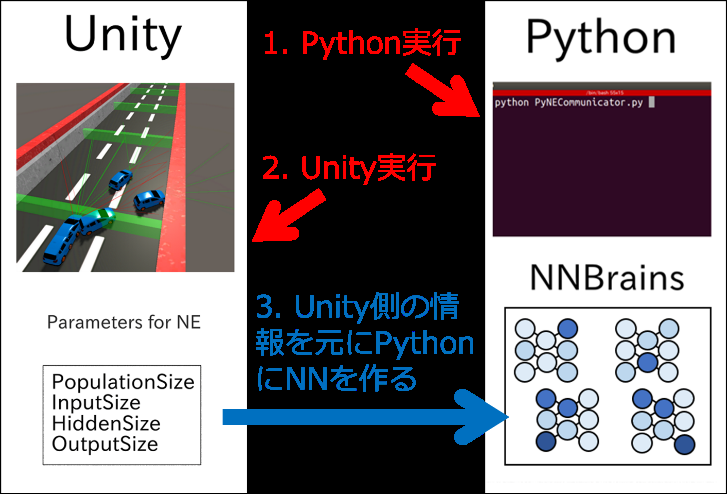 |
自動運転学習のプロジェクト(python連携版)(付録C) | Unity のC#コードとPython プログラムを連携します。 Numpy などの数値計算モジュール,Tensorflow, PyTorch などの機械学習モジュールを用いることができます。 [プログラム(5.5MB)] |
LGPCによるシミュレータ(遺伝的プログラミング)
 |
Wall Following 7章の練習問題1 |
壁に沿うロボット動作の進化学習 [使用法] [プログラム(.exe, 477kB)] |
Mind Render(教育用VRソフト)
 |
Mind Render (2.1節) | VRプログラムを作って遊べるプログラミング学習アプリです。 ニューロ進化の手法で機械学習させたレーシングカーを動かすことができます。 また、コース上の障害物の配置を変更しても、ある程度回避できる様子が楽しめます。 [解説ページ] |
 |
演習問題のヒントと解答例
 |
オープンエンド性(終わりなき進化) (演習問題5.2) |
自動車の形態と地面の形状の共進化シミュレーション。 一部の機能は未完成です。 [プログラム(65KB)] 観察・考察のレポート例 |
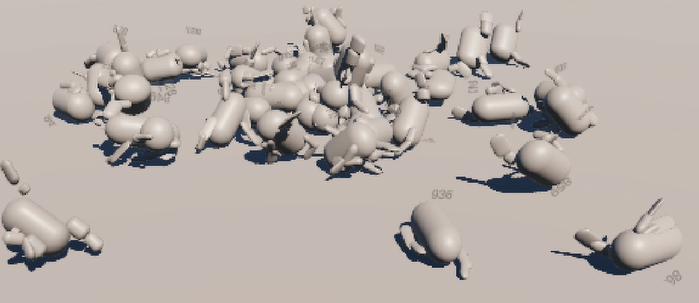 |
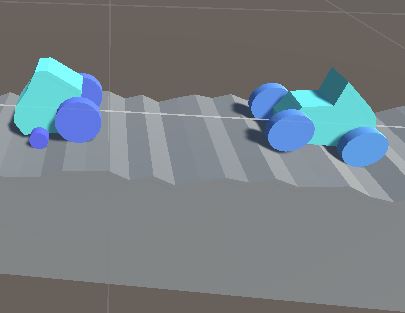
ロボットの動き(人工生命の4足歩行)を進化させよう |
遺伝的アルゴリズムによる4足歩行の学習 [プログラム(1.6MB)] 観察・考察のレポート例 バグの修正について |
 |
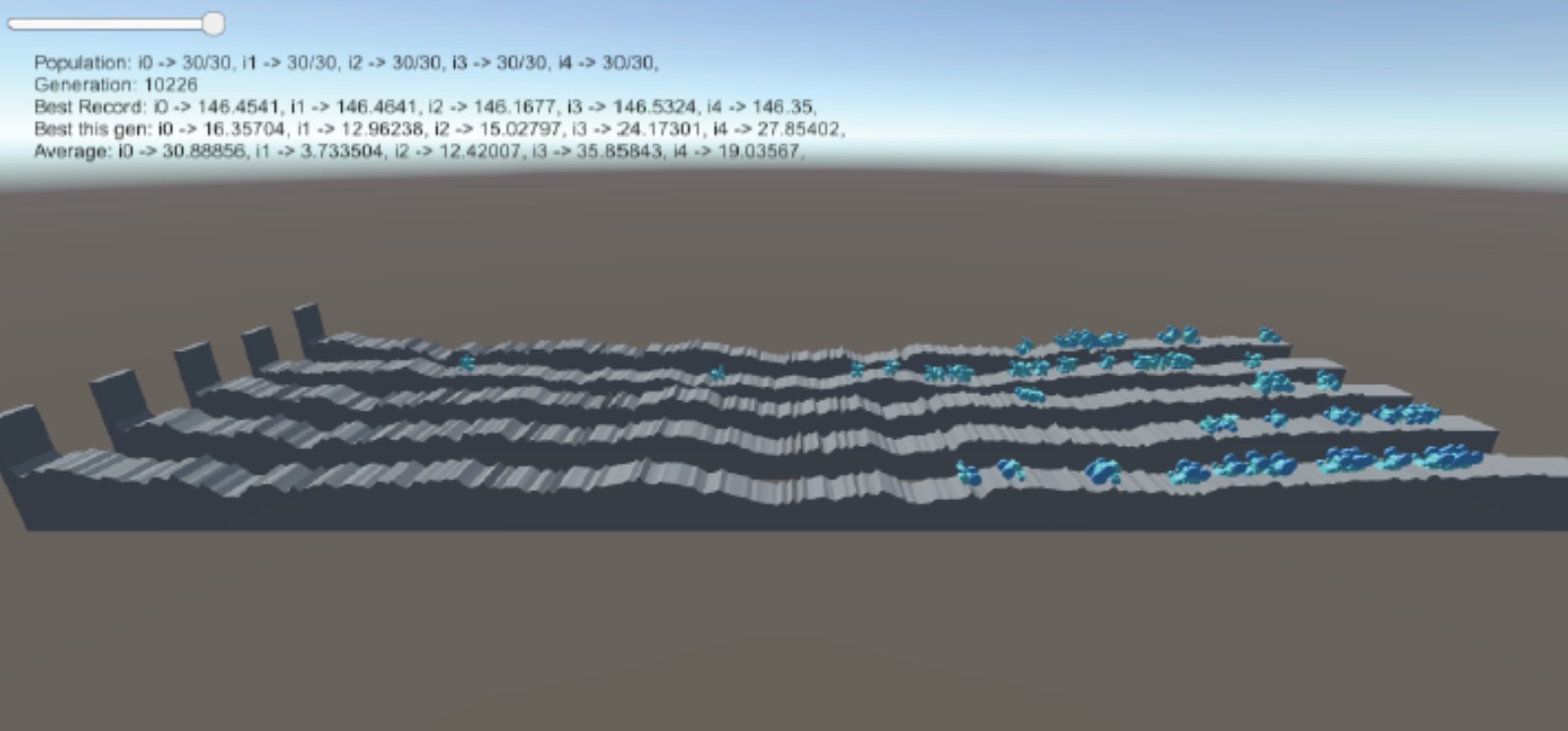
ロボットの動き(人工生命の4足歩行)を進化させよう 応用1 |
4足歩行の学習を以下の5つの環境で進化させました。
(1)谷(Valley),
(2)障害物(Obstacle),
(3)谷+水(SwimValley),
(4)障害物+水(SwimObstacle),
(5)水(SwimSample).
水のある環境では、個体が泳ぐ動作を行います。 [プログラム(3.5MB)] バグの修正について |
 |
ロボットの動き(人工生命の4足歩行)を進化させよう 応用2 |
ロボットの形態を変えて進化の実験を行いました。具体的には、
(1)足の数(6-legs.unity),
(2)関節数(joint-2.unity),
(3)胴の節(milestone-1.unity)などを変えています。
[プログラム(1.68MB)] バグの修正について |
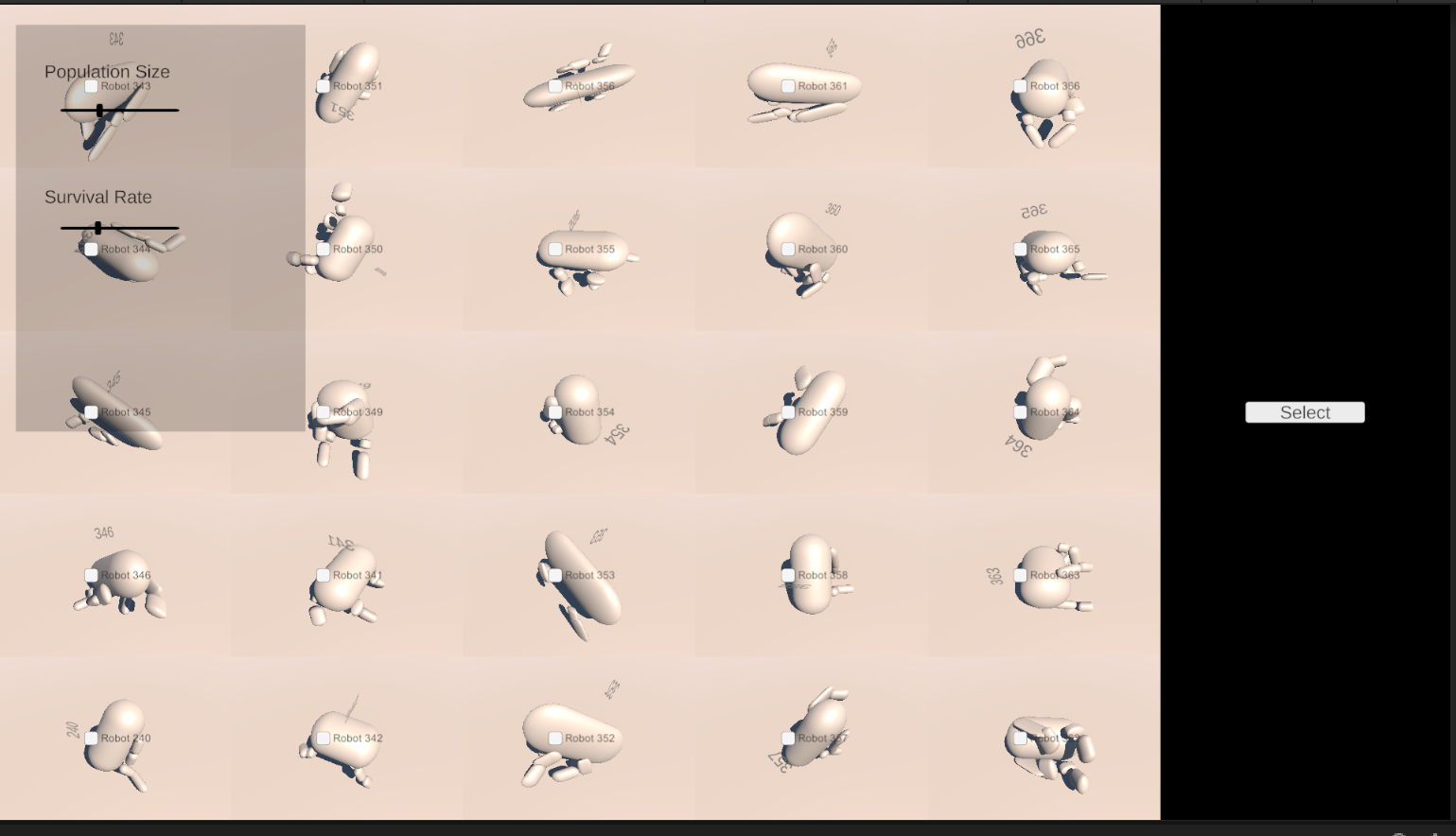 |
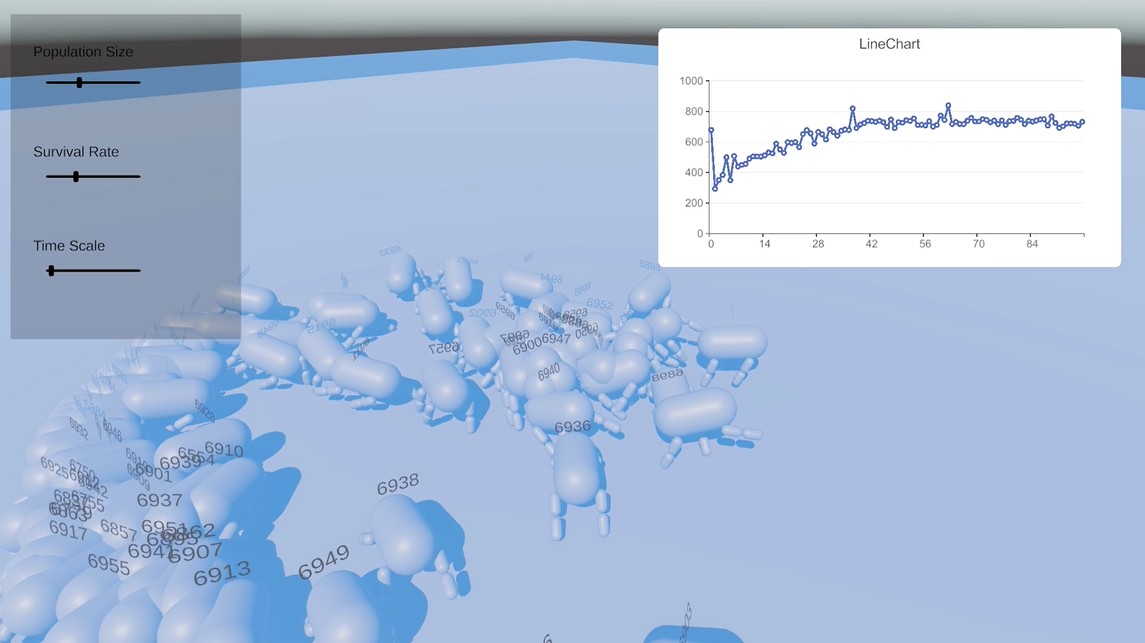
ロボットの動き(人工生命の4足歩行)を進化させよう (演習問題5.3) |
対話型進化計算による動作デザイン survival rateのスライダーは生存率を決定します。 チェックボックスで選択した個体が「良い」個体とされ、「良い」個体は生存する確率が高くなります。 「select」をクリックすると進化が進みます。 [プログラム(1.5MB)] バグの修正について |
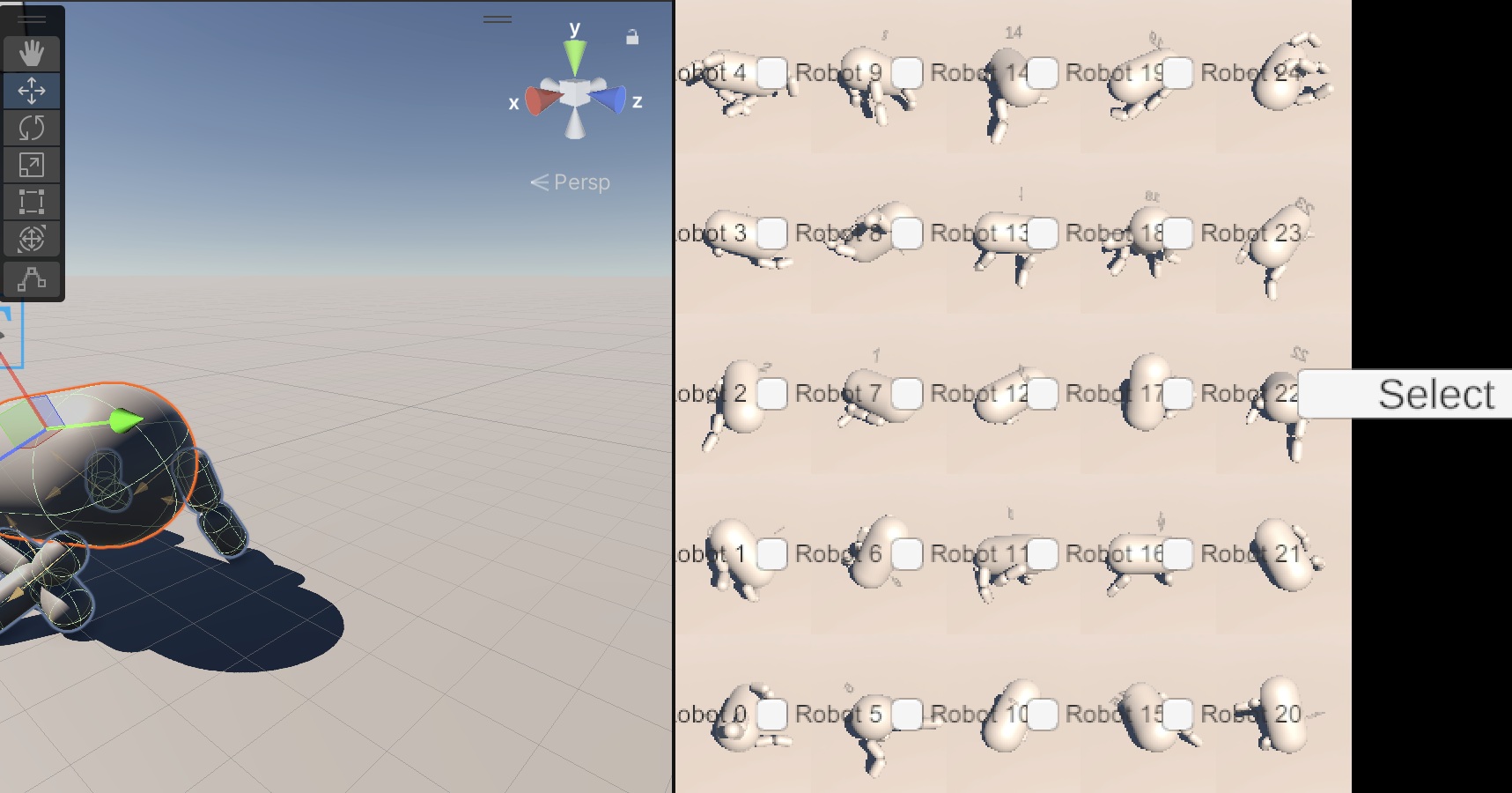 |
ロボットの動き(人工生命の4足歩行)を進化させよう (演習問題5.3) |
対話型進化計算による動作デザイン(改良版) 「select」をクリックすると進化が進みます。 [プログラム(1.64MB)] バグの修正について |
 |
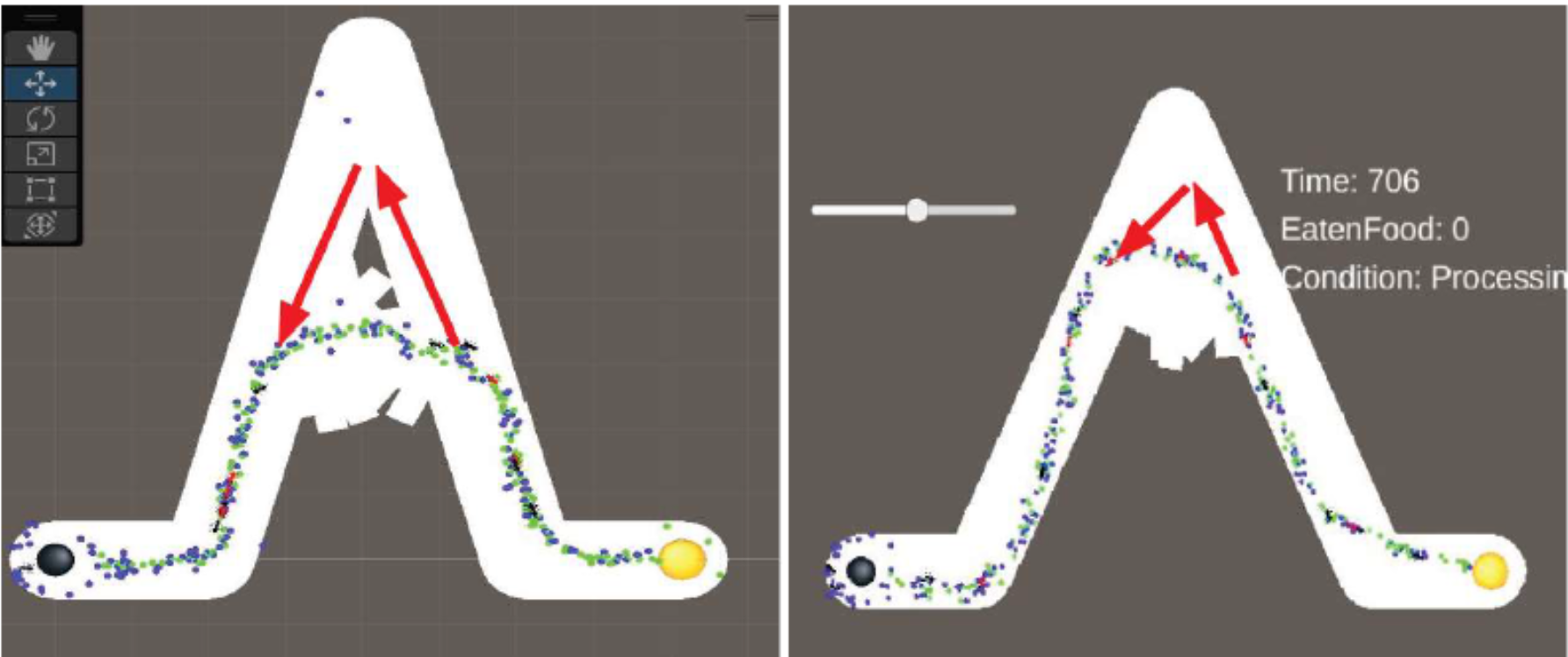
橋を作るアリ (演習問題6.4) |
利他行動のシミュレーションです。 詳細はREADME.txtを参照してください。 一部の機能は未完成・バグの可能性があります。 [プログラム(4MB)] |
 |
橋を作るアリ(改良版) (演習問題6.4) |
利他行動のシミュレーションです。 詳細はREADME.txtを参照してください。 Macでの動作を確認済。Windows上では動作しない可能性があります。 [プログラム(3.2MB)] 観察・考察のレポート例 |
 |
鳥や魚の群れ行動の最適化 (演習問題7.2,7.3) |
Couzinアルゴリズムのパラメータの最適化を行います。 詳細はREADME.pdfを参照してください。 `/Optimize/PreyPredator3.unity`は未完成です(頂点捕食者がいる場合のPSOと焼きなまし法、適合度の定義部分など)。 [プログラム(40MB)] |
 |
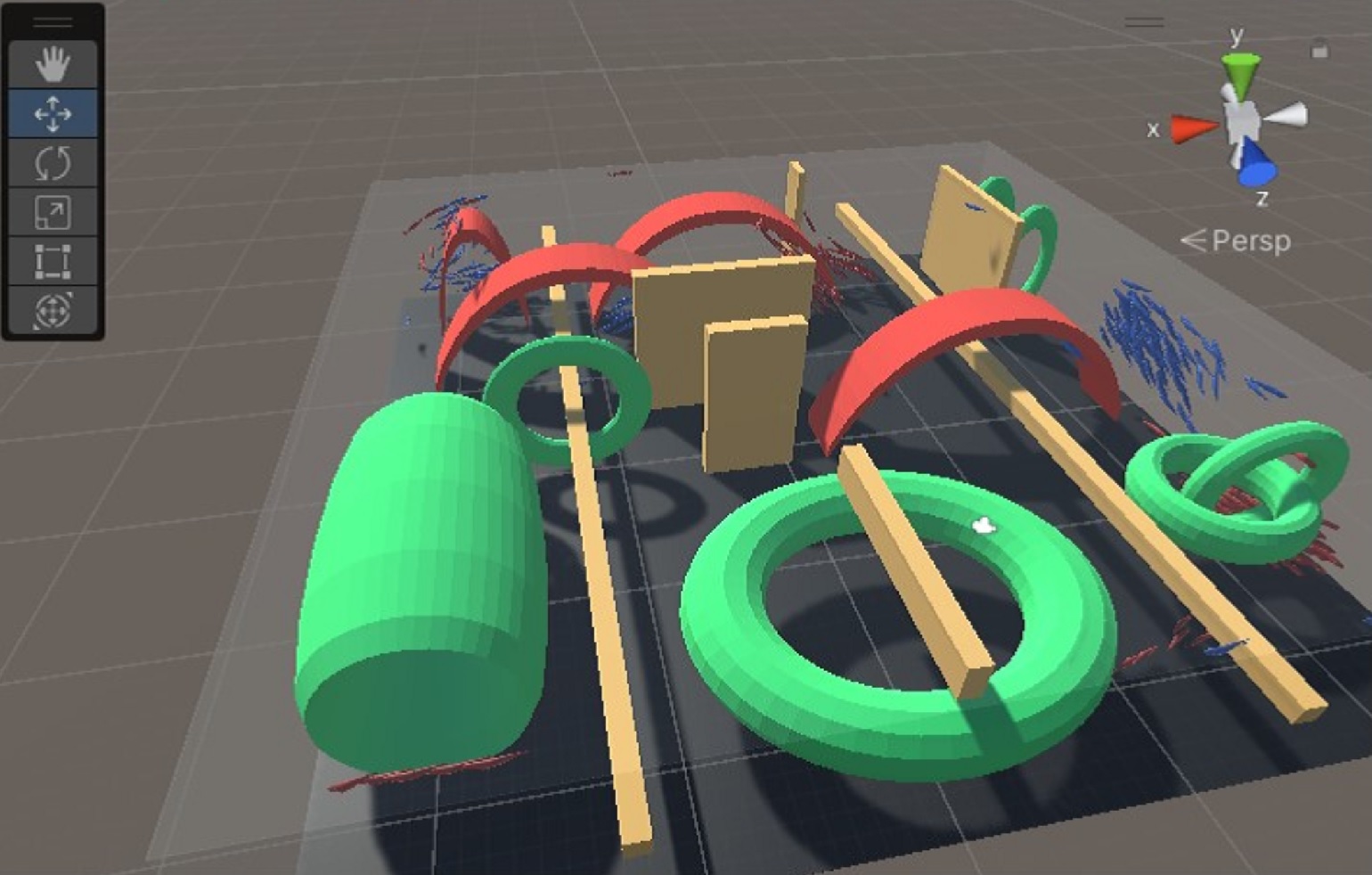
Braitenbergビークル (演習問題8.2,8.3) |
Braitenbergビークルのシミュレーションです。 詳細はREADME.mdを参照してください。 一部の機能は未完成です。 [プログラム(4MB)] |