さらに進化型ロボットは、他のAIのアプローチとの特徴を多く共有している。それらは、
- 行動主義に基くロボット(Behavior-based robots)
- ロボット学習
- マルチエージェント学習と協調計算
- 人工生命
- 進化するハードウェア
「進化型ロボット」に関連する卒論テーマの例
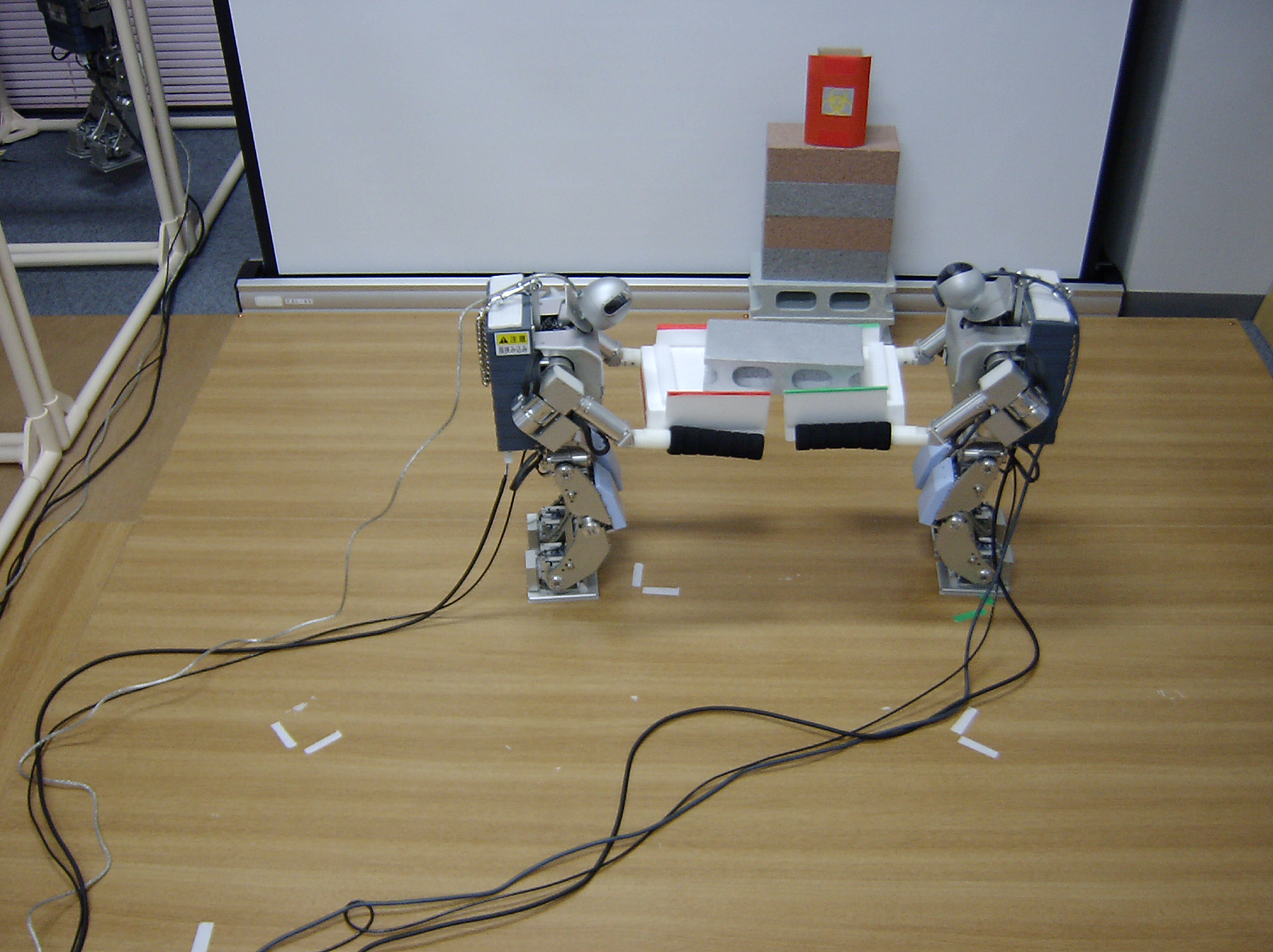
(過去に実施したものなので、卒論配属されてもこれと同じテーマを扱うわけではない。)- 「遺伝子制御ネットワークを用いたヒューマノイドロボットの動作学習」(120433)
- 「二足歩行ロボットのためのGRN動作形成システム」(130454)
- 「ヒューマノイドスケーティングの進化的学習」(130398)
- 「進化的学習を用いたヒューマノイドロボットにおけるブランコ動作の設計」(130425)
- 「ヒューマノイドロボットによるスローイング動作の進化的学習」(130432)